1 配置内核
-
配置内核。在编译内核之前,必须根据实际情况对内核的各个模块作出选择。
#make config(基于文本的配置界面,不推荐使用) #make menuconfig(基于文本菜单的配置界面) #make xconfig(要求QT被安装) -
配置内核的工具是基于Kconfig的机制完成的,也就是在每一级的目录添加Kconfig文件,对源代码的选择作出描述或者配置。相当于,在每一级目录下添加了条件编译。
2 构建系统
基于上一小节的理解,为了将程序添加到Linux内核中,需要作下面工作:
- 编写源代码,拷贝到Linux内核源代码的相应目录中。
- 在该目录的Kconfig文件中增加关于新源代码对应项目的编译配置选项。
- 在该目录的 Makefile 文件中增加对新源代码的编译条目。
关于构建系统的具体语法可以参考Linux设备驱动开发3-Kconfig构建系统。
3 实例
我们还是以hello.c文件作为示例,看看详细的添加一个模块程序的步骤。
在drivers/目录下添加test目录,在test/下添加下面三个文件
-
hello.c
#include <linux/init.h> #include <linux/module.h> MODULE_LICENSE("Dual BSD/GPL"); static int hello_init(void) { printk(KERN_ALERT "Hello, world\n"); return 0; } static void hello_exit(void) { printk(KERN_ALERT "Goodbye, cruel world\n"); } module_init(hello_init); module_exit(hello_exit); -
Makefile
# drivers/test/Makefile # # Makefile for the TEST. # obj-$(CONFIG_TEST_HELLO) += hello.o -
Kconfig
# # TEST driver configuration # menu "TEST Driver" comment "TEST Driver" config TEST bool "TEST support " default y config TEST_USER tristate "TEST user-space interface" depends on TEST config TEST_HELLO tristate "TEST hello world" depends on TEST endmenu -
修改drivers/目录下的Makefile
在文件的最后,添加如下一行代码:
obj-$(CONFIG_TEST) += test/ -
修改drivers/目录下的Kconfig
在文件的最后,添加如下一行代码:
source "drivers/test/Kconfig" -
然后执行,
make CROSS_COMPILE=arm-linux-gnueabi- ARCH=arm menuconfig进入如下所示的界面中选择我们想要的模块。
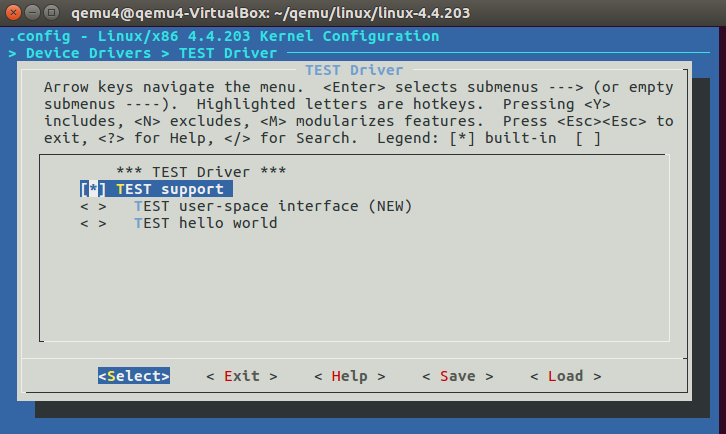
-
保存配置结果,进行编译
make CROSS_COMPILE=arm-linux-gnueabi- ARCH=arm编译结果:
OBJCOPY arch/arm/boot/Image Kernel: arch/arm/boot/Image is ready Kernel: arch/arm/boot/Image is ready GZIP arch/arm/boot/compressed/piggy.gzip AS arch/arm/boot/compressed/piggy.gzip.o LD arch/arm/boot/compressed/vmlinux OBJCOPY arch/arm/boot/zImage Kernel: arch/arm/boot/zImage is ready Building modules, stage 2. MODPOST 6 modules CC drivers/test/hello.mod.o LD [M] drivers/test/hello.ko
从上面的结果可以看出,hello.ko内核模块已经生成。将编译的内核和模块与rootfs根文件系统一起加载到开发板上运行,具体的步骤可以参考Linux设备驱动开发0-环境搭建。
制作完成后,加载到开发板,运行。代码执行结果:
/ # insmod /lib/modules/4.4.203/kernel/drivers/test/hello.ko
Hello, world
/ # rmmod hello.ko
Goodbye, cruel world
/ #
rcS文件
PATH=/sbin:/bin:/usr/sbin:/usr/bin:/usr/local/bin:
runlevel=S
prevlevel=N
umask 022
export PATH runlevel prevlevel
# Trap CTRL-C &c only in this shell so we can interrupt subprocesses.
trap ":" INT QUIT TSTP
/bin/hostname qemu-a9-test
/bin/mount -n -t proc none /proc
/bin/mount -n -t sysfs none /sys
# /bin/mount -n -t usbfs none /proc/bus/usb
/bin/mount -t ramfs none /dev
echo /sbin/mdev > /proc/sys/kernel/hotplug
/sbin/mdev -s
# /bin/hotplug
# mounting file system specified in /etc/fstab
mkdir -p /dev/pts
mkdir -p /dev/shm
/bin/mount -n -t devpts none /dev/pts -o mode=0622
/bin/mount -n -t tmpfs tmpfs /dev/shm
/bin/mount -n -t ramfs none /tmp
/bin/mount -n -t ramfs none /var
mkdir -p /var/empty
mkdir -p /var/log
mkdir -p /var/lock
mkdir -p /var/run
mkdir -p /var/tmp
# /sbin/hwclock -s -f /dev/rtc
syslogd
# /etc/rc.d/init.d/netd start
# echo " " > /dev/tty1
# echo "Starting networking..." > /dev/tty1
# mkdir /mnt/disk
# mount -t yaffs2 /dev/mtdblock3 /mnt/disk
# echo V > /dev/watchdog
# /sbin/ifconfig lo 127.0.0.1
# insmod /lib/modules/s3c2416_gpio.ko
# /bin/sleep 2 dmesg -n 1
# exec /usr/etc/rc.local