1 引言
为了阅读Linux内核源代码,是需要一些汇编语言知识的。因为与架构相关的代码基本上都是用汇编语言编写的,所以掌握一些基本的汇编语言语法,能够更好地理解Linux内核源代码,甚至可以对各种架构的差异有一个更深入的理解。
大部分人可能认为汇编语言晦涩难懂,阅读手册又冗长乏味。但是,经过本人的经验,可能常用的指令也就是30个。许多其它的指令都是解决特定的情况而出现,比如浮点运算和多媒体指令。所以,本文就从常用指令出发,基于GNU汇编语言格式,对x86_64架构和ARM架构下的指令做了一个入门介绍。学习完这篇文章,希望可以对汇编有一个基本的理解,并能够解决大部分问题。
阅读本文需要一些硬件架构的知识。必要的时候,可以翻阅Intel Software Developer Manual和ARM Architecture Reference Manual。
2 开源汇编工具
对于相同的芯片架构,不同的芯片制造商或者其它开源工具可能会有不同的语法格式。所以,本文支持GNU编译器和汇编器,分别是gcc和as(有时候也称为gas)。
将C代码转换成汇编代码,是一种非常好的学习方式。所以,可以通过在编译选项中加入-S标志,生成汇编目标文件。在类Unix系统,汇编源代码文件使用.s的后缀标记。
比如,运行gcc -S hello.c -o hello.s编译命令,编译hello程序:
#include <stdio.h>
int main( int argc, char *argv[] )
{
printf("hello %s\n","world");
return 0;
}
可以在hello.s文件中看到如下类似的输出:
.file "test.c"
.data
.LC0:
.string "hello %s\n"
.LC1:
.string "world"
.text
.global main
main:
PUSHQ %rbp
MOVQ %rsp, %rbp
SUBQ $16, %rsp
MOVQ %rdi, -8(%rbp)
MOVQ %rsi, -16(%rbp)
MOVQ $.LC0, %rax
MOVQ $.LC1, %rsi
MOVQ %rax, %rdi
MOVQ $0, %rax
CALL printf
MOVQ $0, %rax
LEAVE
RET
从上边的汇编代码中可以看出,汇编代码大概由三部分组成:
-
伪指令
伪指令前缀一个小数点
.,供汇编器、链接器或者调试器使用。比如,.file记录最初的源文件名称,这个名称对调试器有用;.data,表明该部分的内容是程序的数据段;.text,表明接下来的内容是程序代码段的内容;.string,表示一个数据段中的字符串常量;.global main,表示符号main是一个全局符号,可以被其它代码模块访问。 -
标签
标签是由编译器产生,链接器使用的一种引用符号。本质上,就是对代码段的一个作用域打上标签,方便链接器在链接阶段将所有的代码拼接在一起。所以,标签就是链接器的一种助记符。
-
汇编指令
真正的汇编代码,其实就是机器码的助记符。GNU汇编对大小写不敏感,但是为了统一,我们一般使用大写。
汇编代码编译成可执行文件,可以参考下面的代码编译示例:
% gcc hello.s -o hello
% ./hello
hello world
把汇编代码生成目标文件,然后可以使用nm工具显示代码中的符号,参考下面的内容:
% gcc hello.s -c -o hello.o
% nm hello.o
0000000000000000 T main
U printf
nm -> 是names的缩写,nm命令主要是用来列出某些文件中的符号(换句话说就是一些函数和全局变量)。
上面的代码显示的符号对于链接器都是可用的。main出现在目标文件的代码段(T),位于地址0处,也就是说位于文件的开头;printf未定义(U),因为它需要从库文件中链接。但是像.LC0之类的标签出现,因为它们没有使用.global,所以说对于链接器是无用的。
编写C代码,然后编译成汇编代码。这是学习汇编一个好的开始。
3 X86汇编语言
X86是一个通用术语,指从最初的IBM-PC中使用的Intel-8088处理器派生(或兼容)的一系列微处理器,包括8086、80286、386、486以及其它许多处理器。每一代cpu都增加了新的指令和寻址模式(从8位到16位再到32位)。同时还保留了与旧代码的向后兼容性。各种竞争对手(如AMD)生产的兼容芯片也实现了相同的指令集。
但是,到了64位架构的时候,Intel打破了这个传统,引入了新的架构(IA64)和名称(Itanium),不再向后兼容。它还实现了一种新的技术-超长指令字(VLIW),在一个Word中实现多个并发操作。因为指令级的并发操作可以显著提升速度。
AMD还是坚持老方法,实现的64位架构(AMD64)向后兼容Intel和AMD芯片。不论两种技术的优劣,AMD的方法首先赢得了市场,随后Intel也生产自己的64位架构Intel64,并与AMD64和它自己之前的产品兼容。所以,X86-64是一个通用术语,包含AMD64和Intel64架构。
X86-64是复杂指令集CISC的代表。
3.1 寄存器和数据类型
X86-64具有16个通用目的64位寄存器:
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| %rax | %rbx | %rcx | %rdx | %rsi | %rdi | %rbp | %rsp | %r8 | %r9 | %r10 | %r11 | %r12 | %r13 | %r14 | %r15 |
说它们是通用寄存器是不完全正确的,因为早期的CPU设计寄存器是专用的,不是所有的指令都能用到每一个寄存器。从名称上就可以看出来,前八个寄存器的作用,比如rax就是一个累加器。
AT&T语法-Intel语法
GNU使用传统的AT&T语法,许多类Unix操作系统使用这种风格,与DOS和Windows上用的Intel语法是不同的。 下面一条指令是符合AT&T语法:
MOVQ %RSP, %RBPMOVQ是指令,%表明RSP和RBP是寄存器。AT&T语法,源地址在前,目的地址在后。
Intel语法省略掉%,参数顺序正好相反。同样的指令,如下所示:
MOVQ RBP, RSP所以,看%就能区分是AT&T语法,还是Intel语法。
随着设计的发展,新的指令和寻址模式被添加进来,使得这些寄存器几乎一样了。其余的指令,尤其是和字符串处理相关的指令,要求使用rsi和rdi寄存器。另外,还有两个寄存器专门为栈指针寄存器(rsp)和基址指针寄存器(rbp)保留。最后的8个寄存器没有特殊的限制。
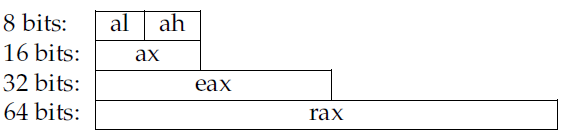
随着处理器从8位一直扩展到64位,有一些寄存器还能拆分使用。rax的低八位是一个8位寄存器al,接下来的8位称为ah。如果把rax的低16位组合起来就是ax寄存器,低32位就是累加器eax,整个64位才是rax寄存器。这样设计的目的是向前兼容,具体可以参考下图:
图1: X86 寄存器结构
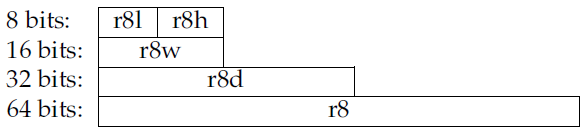
r8-r15,这8个寄存器具有相同的结构,就是命名机制不同。
图2: X86 寄存器结构
为了简化描述,我们还是着重讲64位寄存器。但是,大多数编译器支持混合模式:一个字节可以表示一个布尔型;32位对于整数运算就足够了,因为大多数程序不需要大于2^32以上的整数值;64位类型常用于内存寻址,能够使虚拟地址的空间理论上可以达到1800万TB(1TB=1024GB)。
3.2 寻址模式
MOV指令可以使用不同的寻址模式,在寄存器和内存之间搬运数据。使用B、W、L和Q作为后缀,添加在指令后面,决定操作的数据的位数:
| 后缀 | 名称 | 大小 |
|---|---|---|
| B | BYTE | 1 字节(8位) |
| W | WORD | 2 字节(16位) |
| L | LONG | 4 字节(32位) |
| Q | QUADWORD | 8 字节(64位) |
MOVB移动一个字节,MOVW移动2个字节,MOVL移动4个字节,MOVQ移动8个字节。在某些情况下,可以省略掉这个后缀,编译器可以推断正确的大小。但还是建议加上后缀。
MOV指令可以使用下面几种寻址模式:
-
全局符号
一般给其定义一个简单的名称,通过这个名称来引用,比如x、printf之类的。编译器会将其翻译成绝对地址或用于地址计算。
-
立即数
使用美元符号$标记,比如$56。但是立即数的使用是有限制范围的。
-
寄存器
使用寄存器寻址,比如%rbx。
-
间接引用
通过寄存器中包含的地址进行寻址,比如
(%rsp),表示引用%rsp指向的那个值。 -
基址变址寻址
在间接引用的基础上再加上一个常数作为地址进行寻址。比如
-16(%rcx),就是寄存器rcx中的地址再减去16个字节的地址处的内容。这种模式对于操作堆栈,局部变量和函数参数非常重要。 -
复杂地址寻址
比如,
D(RA,RB,C),就是引用*RA + RB * C + D*计算后的地址处的值。RA和RB是通用目的寄存器,C可以是1、2、4或8,D是一个整数位移。这种模式一般用于查找数组中的某一项的时候,RA给出数组的首地址,RB计算数组的索引,C作为数组元素的大小,D作为相对于那一项的偏移量。
下表是不同寻址方式下加载一个64位值到%rax寄存器的示例:
| 寻址模式 | 示例 |
|---|---|
| 全局符号 | MOVQ x, %rax |
| 立即数 | MOVQ $56, %rax |
| 寄存器 | MOVQ %rbx, %rax |
| 间接引用 | MOVQ (%rsp), %rax |
| 基址变址寻址 | MOVQ -8(%rbp), %rax |
| 复杂地址寻址 | MOVQ -16(%rbx,%rcx,8), %rax |
大部分时候,目的操作数和源操作数都可以使用相同的寻址模式,但是也有例外,比如MOVQ -8(%rbx), -8(%rbx),源和目的都使用基址变址寻址方式就是不可能的。具体的就需要查看手册了。
有时候,你可能需要加载变量的地址而不是其值,这对于使用字符串或数组是非常方便的。为了这个目的,可以使用LEA指令(加载有效地址),示例如下:
| 寻址模式 | 示例 |
|---|---|
| 全局符号 | LEAQ x, %rax |
| 基址变址寻址 | LEAQ -8(%rbp), %rax |
| 复杂地址寻址 | LEAQ -16(%rbx,%rcx,8), %rax |
3.3 基本算术运算
你需要为你的编译器提供四种基本的算术指令:整数加法、减法、乘法和除法。
ADD和SUB指令有两个操作数:源操作目标和既作源又作目的的操作目标。比如:
ADDQ %rbx, %rax
将%rbx加到%rax上,把结果存入%rax。这必须要小心,以免破坏后面可能还用到的值。比如:c = a+b+b这样的语句,转换成汇编语言大概是下面这样:
MOVQ a, %rax
MOVQ b, %rbx
ADDQ %rbx, %rax
ADDQ %rbx, %rax
MOVQ %rax, c
IMUL乘法指令有点不一样,因为通常情况下,两个64位的整数会产生一个128位的整数。IMUL指令将第一个操作数乘以rax寄存器中的内容,然后把结果的低64位存入rax寄存器中,高64位存入rdx寄存器。(这里有一个隐含操作,rdx寄存器在指令中并没有提到)
比如,假设这样的表达式c = b*(b+a),将其转换成汇编语言;在这儿,a、b、c都是全局整数。
MOVQ a, %rax
MOVQ b, %rbx
ADDQ %rbx, %rax
IMULQ %rbx
MOVQ %rax, c
IDIV指令做相同的操作,除了最后的处理:它把128位整数的低64位存入rax寄存器,高64位存入rdx寄存器,然后除以指令中的第一个操作数。商存入rax寄存器,余数存入rdx寄存器。(如果想要取模指令,只要rdx寄存器的值即可。)
为了正确使用除法,必须保证两个寄存器有必要的符号位。如果被除数低64位就可以表示,但是是负数,那么高64位必须都是1,才能完成二进制补码操作。CQO指令可以实现这个特殊目的,将rax寄存器的值的符号位扩展到rdx寄存器中。
比如,一个数被5整除:
MOVQ a, %rax # 设置被除数的低64位
CQO # 符号位扩展到%rdx
IDIVQ $5 # %rdx:%rax除以5,结果保存到%rax
自增和自减指令INC、DEC,操作数必须是一个寄存器的值。例如,表达式a = ++b转换成汇编语句后:
MOVQ b, %rax
INCQ %rax
MOVQ %rax, b
MOVQ %rax, a
指令AND、OR和XOR,提供按位操作。按位操作意味着把操作应用到操作数的每一位,然后保存结果。
所以,AND $0101B $0110B就会产生结果$0100B。同样,NOT指令对操作数的每一位执行取反操作。比如,表达式c = (a & ˜b),可以转换成下面这样的汇编代码:
MOVQ a, %rax
MOVQ b, %rbx
NOTQ %rbx
ANDQ %rax, %rbx
MOVQ %rbx, c
这里需要注意的是,算术位操作与逻辑bool操作是不一样的。比如,如果你定义false为整数0,true为非0。在这种情况下,$0001是true,而NOT $0001B的结果也是true!要想实现逻辑bool操作,需要使用CMP比较指令。
与MOV指令一样,各种算术指令能在不同寻址模式下工作。但是,对于一个编译器项目,使用MOV指令搬运寄存器之间或者寄存器与立即数之间的值,然后仅使用寄存器操作,会更加方便。
3.4 比较和跳转
使用JMP跳转指令,我们就可以创建一个简单的无限循环,使用rax累加器从0开始计数,代码如下:
MOVQ $0, %rax loop: INCQ %rax
JMP loop
但是,我们大部分时候需要的是一个有限的循环或者if-then-else这样的语句,所以必须提供计算比较值并改变程序执行流的指令。大部分汇编语言都提供2个指令:比较和跳转。
CMP指令完成比较。比较两个不同的寄存器,然后设置EFLAGS寄存器中对应的位,记录比较的值是相等、大于还是小于。使用带有条件跳转的指令自动检查EFLAGS寄存器并跳转到正确的位置。
| 指令 | 意义 |
|---|---|
| JE | 如果相等跳转 |
| JNE | 如果不相等跳转 |
| JL | 小于跳转 |
| JLE | 小于等于跳转 |
| JG | 大于跳转 |
| JGE | 大于等于跳转 |
下面是使用%rax寄存器计算0到5累加值的示例:
MOVQ $0, %rax loop: INCQ %rax
CMPQ $5, %rax
JLE loop
下面是一个条件赋值语句,如果全局变量x大于0,则全局变量y=10,否则等于20:
MOVQ x, %rax
CMPQ $0, %rax
JLE .L1
.L0:
MOVQ $10, $rbx
JMP .L2
.L1:
MOVQ $20, $rbx
.L2:
MOVQ %rbx, y
注意,跳转指令要求编译器定义标签。这些标签在汇编文件内容必须是唯一且私有的,对文件外是不可见的,除非使用.global伪指令。标签像.L0、.L1等是由编译器根据需要生成的。
3.5 栈
栈是记录函数调用过程和局部变量的一种数据结构,也可以说,如果没有栈,C语言的函数是无法工作的。%rsp寄存器称为栈指针寄存器,永远指向栈顶元素(栈的增长方向是向下的)。
为了把%rax寄存器的内容压入栈中,我们必须把%rsp寄存器减去8(%rax寄存器的大小),然后再把%rax寄存器内容写入到%rsp寄存器指向的地址处:
SUBQ $8, %rsp
MOVQ %rax, (%rsp)
从栈中弹出数据,正好相反:
MOVQ (%rsp), %rax
ADDQ $8, %rsp
如果仅仅是抛弃栈中最近的值,可以只移动栈指针正确的字节数即可:
ADDQ $8, %rsp
当然了,压栈和出栈是常用的操作,所以有专门的指令:
PUSHQ %rax
POPQ %rax
需要注意的是,64位系统中,PUSH和POP指令被限制只能使用64位值,所以,如果需要压栈、出栈比这小的数必须使用MOV和ADD实现。
3.6 函数调用
先介绍一个简单的栈调用习惯:参数按照相反的顺序被压入栈,然后使用CALL调用函数。被调用函数使用栈上的参数,完成函数的功能,然后返回结果到eax寄存器中。调用者删除栈上的参数。
但是,64位代码为了尽可能多的利用X86-64架构中的寄存器,使用了新的调用习惯。称之为System V ABI,详细的细节可以参考ABI接口规范文档。这儿,我们总结如下:
-
前6个参数(包括指针和其它可以存储为整形的类型)依次保存在寄存器
%rdi、%rsi、%rdx、%rcx、%r8和%r9。 -
前8个浮点型参数依次存储在寄存器%xmm0-%xmm7。
-
超过这些寄存器个数的参数才被压栈。
-
如果函数接受可变数量的参数(如printf),则必须将
%rax寄存器设置为浮动参数的数量。 -
函数的返回值存储在
%rax。
另外,我们也需要知道其余的寄存器是如何处理的。有一些是调用者保存,意味着函数在调用其它函数之前必须保存这些值。另外一些则由被调用者保存,也就是说,这些寄存器可能会在被调用函数中修改,所以被调用函数需要保存调用者的这些寄存器的值,然后从被调用函数返回时,恢复这些寄存器的值。保存参数和结果的寄存器根本不需要保存。下表详细地展示了这些细节:
表-System V ABI寄存器分配表
| 寄存器 | 目的 | 谁保存 |
|---|---|---|
| %rax | 结果 | 不保存 |
| %rbx | 临时 | 被调用者保存 |
| %rcx | 参数4 | 不保存 |
| %rdx | 参数3 | 不保存 |
| %rsi | 参数2 | 不保存 |
| %rdi | 参数1 | 不保存 |
| %rbp | 基址指针 | 被调用者保存 |
| %rsp | 栈指针 | 被调用者保存 |
| %r8 | 参数5 | 不保存 |
| %r9 | 参数6 | 不保存 |
| %r10 | 临时 | 调用者保存 |
| %r11 | 临时 | 调用者保存 |
| %r12 | 临时 | 被调用者保存 |
| %r13 | 临时 | 被调用者保存 |
| %r14 | 临时 | 被调用者保存 |
| %r15 | 临时 | 被调用者保存 |
为了调用函数,首先必须计算参数,并把它们放置到对应的寄存器中。然后把2个寄存器%r10和%r11压栈,保存它们的值。然后发出CALL指令,它会吧当前的指令指针压入栈,然后跳转到被调函数的代码位置。当从函数返回时,从栈中弹出%r10和%r11的内容,然后就可以利用%rax寄存器的返回结果了。
这是一个C代码示例:
int x=0;
int y=10;
int main()
{
x = printf("value: %d\n",y);
}
翻译成汇编语言大概是:
.data
x:
.quad 0
y:
.quad 10
str:
.string "value: %d\n"
.text
.global main
main:
MOVQ $str, %rdi # 第一个参数保存到%rdi中,是字符串类型
MOVQ y, %rsi # 第二个参数保存到%rsi中,是y
MOVQ $0, %rax # 0个浮动参数
PUSHQ %r10 # 保存调用者保存的寄存器
PUSHQ %r11
CALL printf # 调用printf
POPQ %r11 # 恢复调用者保存的寄存器
POPQ %r10
MOVQ %rax, x # 保存结果到x
RET # 从main函数返回
3.7 定义叶子函数
因为函数参数保存到寄存器中,所以写一个不调用其它函数的叶子函数是非常简单的。比如,下面的代码:
square: function integer ( x: integer ) =
{
return x*x;
}
可以简化为:
.global square
square:
MOVQ %rdi, %rax # 拷贝第一个参数到%rax
IMULQ %rax # 自己相乘
# 结果保存到%rax
RET # 返回到调用函数中
不幸的是,这对于还要调用其它函数的函数是不可行的,因为我们没有为其建立正确的栈。所以,需要一个复杂方法实现通用函数。
3.8 定义复杂函数
复杂函数必须能够调用其它函数,且能够计算任意复杂度的表达式,还能正确地返回到调用者中。考虑下面的示例,具有3个参数和2个局部变量的函数:
.global func
func:
pushq %rbp # 保存基址指针
movq %rsp, %rbp # 设置新的基址指针
pushq %rdi # 第一个参数压栈
pushq %rsi # 第二个参数压栈
pushq %rdx # 第三个参数压栈
subq $16, %rsp # 给2个局部变量分配栈空间
pushq %rbx # 保存应该被调用者保存的寄存器
pushq %r12
pushq %r13
pushq %r14
pushq %r15
### 函数体 ###
popq %r15 # 恢复被调用者保存的寄存器
popq %r14
popq %r13
popq %r12
popq %rbx
movq %rbp, %rsp # 复位栈指针
popq %rbp # 恢复之前的基址指针
ret # 返回到调用者
这个函数需要追踪的信息比较多:函数参数,返回需要的信息,局部变量空间等等。考虑到这个目的,我们使用基址指针寄存器%rbp。栈指针%rsp指向新栈的栈顶,而%rbp指向新栈的栈底。%rsp和%rbp之间的这段空间就是函数调用的栈帧。
还有就是,函数需要调用寄存器计算表达式,也就是上面的%rbx、%r12、%r13、%r14、%r15、%rbp、%rsp。这些寄存器可能已经在调用者函数体内被使用,所以我们不希望被调用函数内部破坏这些寄存器的值。这就需要在被调用函数中保存这些寄存器的值,在返回之前,再恢复这些寄存器之前的值。
下图是func函数的栈布局:
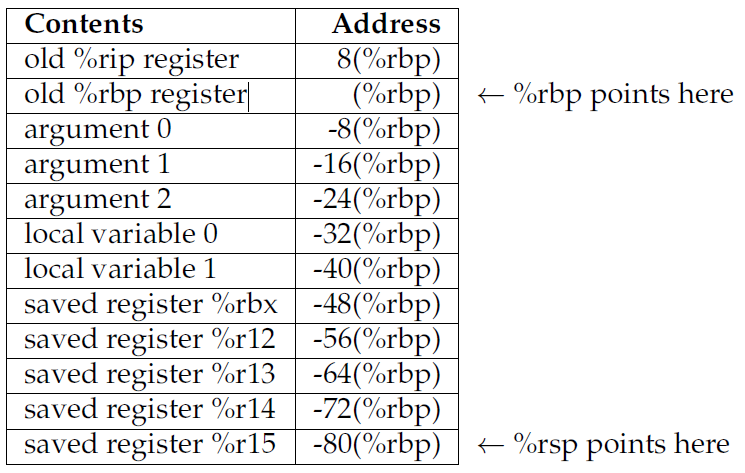
图3 X86-64栈布局示例
基址指针寄存器(%rbp)位于栈的起始处。所以,在函数体内,完全可以使用基址变址寻址方式,去引用参数和局部变量。参数紧跟在基址指针后面,所以参数0的位置就是-8(%rbp),参数1的位置就是-16(%rbp),依次类推。接下来是局部变量,位于-32(%rbp)地址处。然后保存的寄存器位于-48(%rbp)地址处。栈指针指向栈顶的元素。
下面是一个复杂函数的C代码示例:
compute: function integer ( a: integer, b: integer, c: integer ) =
{
x:integer = a+b+c;
y:integer = x*5;
return y;
}
将其完整地转换成汇编代码,如下所示:
.global compute
compute:
##################### preamble of function sets up stack
pushq %rbp # save the base pointer
movq %rsp, %rbp # set new base pointer to rsp
pushq %rdi # save first argument (a) on the stack
pushq %rsi # save second argument (b) on the stack
pushq %rdx # save third argument (c) on the stack
subq $16, %rsp # allocate two more local variables
pushq %rbx # save callee-saved registers
pushq %r12
pushq %r13
pushq %r14
pushq %r15
######################## body of function starts here
movq -8(%rbp), %rbx # load each arg into a register
movq -16(%rbp), %rcx
movq -24(%rbp), %rdx
addq %rdx, %rcx # add the args together
addq %rcx, %rbx
movq %rbx, -32(%rbp) # store the result into local 0 (x)
movq -32(%rbp), %rbx # load local 0 (x) into a register.
movq $5, %rcx # load 5 into a register
movq %rbx, %rax # move argument in rax
imulq %rcx # multiply them together
movq %rax, -40(%rbp) # store the result in local 1 (y)
movq -40(%rbp), %rax # move local 1 (y) into the result
#################### epilogue of function restores the stack
popq %r15 # restore callee-saved registers
popq %r14
popq %r13
popq %r12
popq %rbx
movq %rbp, %rsp # reset stack to base pointer.
popq %rbp # restore the old base pointer
ret # return to caller
下面有转换为汇编的代码段。代码是正确的,但不是完美的。事实证明,这个函数不需要使用寄存器%rbx和%r15,所以不需要保存和恢复他们。同样的,我们也可以把参数就保留在寄存器中而不必把它们压栈。结果也不必存入局部变量y中,而是可以直接写入到%rax寄存器中。这其实就是编译器优化功能的一部分。
4 ARM汇编
最新的ARM架构是ARMv7-A(32位)和ARMv8-A(64位)。本文着重介绍32位架构,最后讨论一下64位体系架构的差异。
ARM是一个精简指令计算机(RISC)架构。相比X86,ARM使用更小的指令集,这些指令更易于流水线操作或并行执行,从而降低芯片复杂度和能耗。但由于一些例外,ARM有时候被认为是部分RISC架构。比如,一些ARM指令执行时间的差异使流水线不完美,为预处理而包含的桶形移位器引入了更复杂的指令,还有条件指令减少了一些潜在指令的执行,导致跳转指令的使用减少,从而降低了处理器的能耗。我们侧重于编写编译器常用到的指令,更复杂的内容和程序语言的优化留到以后再研究。
4.1 寄存器和数据类型
32位ARM架构拥有16个通用目的寄存器,r0~r15,使用约定如下所示:
| 名称 | 别名 | 目的 |
|---|---|---|
| r0 | - | 通用目的寄存器 |
| r1 | - | 通用目的寄存器 |
| … | - | - |
| r10 | - | 通用目的寄存器 |
| r11 | fp | 栈帧指针,栈帧起始地址 |
| r12 | ip | 内部调用临时寄存器 |
| r13 | sp | 栈指针 |
| r14 | lr | 链接寄存器(返回地址) |
| r15 | pc | 程序计数器 |
除了通用目的寄存器,还有2个寄存器:当前程序状态寄存器(CPSR)和程序状态保存寄存器(SPSR),它们不能被直接访问。这两个寄存器保存着比较运算的结果,以及与进程状态相关的特权数据。用户态程序不能直接访问,但是可以通过一些操作的副作用修改它们。
ARM使用下面的后缀表示数据大小。它们与X86架构不同!如果没有后缀,汇编器假设操作数是unsigned word类型。有符号类型提供正确的符号位。任何word类型寄存器不会再有细分且被命名的寄存器。
| 后缀 | 数据类型 | 大小 |
|---|---|---|
| B | Byte | 8 位 |
| H | Halfword | 16 位 |
| W | WORD | 32 位 |
| - | Double Word | 64 位 |
| SB | Signed Byte | 8 位 |
| SH | Signed Halfword | 16 位 |
| SW | Signed Word | 32 位 |
| - | Double Word | 64 位 |
4.2 寻址模式
与X86不同,ARM使用两种不同的指令分别搬运寄存器之间、寄存器与内存之间的数据。MOV拷贝寄存器之间的数据和常量,而LDR和STR指令拷贝寄存器和内存之间的数据。
MOV指令可以把一个立即数或者寄存器值搬运到另一个寄存器中。ARM中,用#表示立即数,这些立即数必须小于等于16位。如果大于16位,就会使用LDR指令代替。大部分的ARM指令,目的寄存器在左,源寄存器在右。(STR是个例外)。具体格式如下:
| 模式 | 示例 |
|---|---|
| 立即数 | MOV r0, #3 |
| 寄存器 | MOV r1, r0 |
MOV指令后面添加标识数据类型的字母,确定传输的类型和如何传输数据。如果没有指定,汇编器假定为word。
从内存中搬运数据使用LDR和STR指令,它们把源寄存器和目的寄存器作为第一个参数,要访问的内存地址作为第二个参数。简单情况下,使用寄存器给出地址并用中括号[]标记:
LDR Rd, [Ra]
STR Rs, [Ra]
Rd,表示目的寄存器;Rs,表示源寄存器;Ra,表示包含内存地址的寄存器。(必须要注意内存地址的类型,可以使用任何内存地址访问字节数据,使用偶数地址访问半字数据等。)
ARM寻址模式
| 模式 | 示例 |
|---|---|
| 文本 | LDR Rd, =0xABCD1234 |
| 绝对地址 | LDR Rd, =label |
| 寄存器间接寻址 | LDR Rd, [Ra] |
| 先索引-立即数 | LDR Rd, [Ra, #4] |
| 先索引-寄存器 | LDR Rd, [Ra, Ro] |
| 先索引-立即数&Writeback | LDR Rd, [Ra, #4]! |
| 先索引-寄存器&Writeback | LDR Rd, [Ra, Ro]! |
| 后索引-立即数 | LDR Rd, [Ra], #4 |
| 后索引-寄存器 | LDR Rd, [Ra], Ro |
如上表所示,LDR和STR支持多种寻址模式。首先,LDR能够加载一个32位的文本值(或绝对地址)到寄存器。(完整的解释请参考下一段内容)。与X86不同,ARM没有可以从一个内存地址拷贝数据的单指令。为此,首先需要把地址加载到一个寄存器,然后执行一个寄存器间接寻址:
LDR r1, =x
LDR r2, [r1]
为了方便高级语言中的指针、数组、和结构体的实现,还有许多其它可用的寻址模式。比如,先索引模式可以添加一个常数(或寄存器)到基址寄存器,然后从计算出的地址加载数据:
LDR r1, [r2, #4] ; # 载入地址 = r2 + 4
LDR r1, [r2, r3] ; # 载入地址 = r2 + r3
有时候可能需要在把计算出的地址中的内容读取后,再把该地址写回到基址寄存器中,这可以通过在后面添加感叹号!实现。
LDR r1, [r2, #4]! ; # 载入地址 = r2 + 4 然后 r2 += 4
LDR r1, [r2, r3]! ; # 载入地址 = r2 + r3 然后 r2 += r3
后索引模式做相同的工作,但是顺序相反。首先根据基址地址执行加载,然后基址地址再加上后面的值:
LDR r1, [r2], #4 ; # 载入地址 = r2 然后 r2 += 4
LDR r1, [r2], r3 ; # 载入地址 = r2 然后 r2 += r3
通过先索引和后索引模式,可以使用单指令实现像我们经常写的C语句b = a++。STR使用方法类似。
在ARM中,绝对地址以及其它长文本更为复杂些。因为每条指令都是32位的,因此不可能将32位的地址和操作码(opcode)一起添加到指令中。因此,长文本存储在一个文本池中,它是程序代码段中一小段数据区域。使用与PC寄存器相关的加载指令,比如LDR,加载文本类型数据,这样的文本池可以引用靠近load指令的±4096个字节数据。这导致有一些小的文本池散落在程序中,由靠近它们的指令使用。
ARM汇编器隐藏了这些复杂的细节。在绝对地址和长文本的前面加上等号=,就代表向汇编器表明,标记的值应该存储在一个文本池中,并使用与PC寄存器相关的指令代替。
例如,下面的指令,把x的地址加载到r1中,然后取出x的值,存入r2寄存器中。
LDR r1, =x
LDR r2, [r1]
下面的代码展开后,将会从相邻的文本池中加载x的地址,然后加载x的值,存入r2寄存器中。也就是,下面的代码与上面的代码是一样的。
LDR r1, .L1
LDR r2, [r1]
B .end
.L1:
.word x
.end:
4.3 基本算术运算
ARM的ADD和SUB指令,使用3个地址作为参数。目的寄存器是第一个参数,第二、三个参数作为操作数。其中第三个参数可以是一个8位的常数,或者带有移位的寄存器。使能进位的加、减法指令,将CPSR寄存器的C标志位写入到结果中。这4条指令如果分别后缀S,代表在完成时是否设置条件标志(包括进位),这是可选的。
| 指令 | 示例 |
|---|---|
| 加 | ADD Rd, Rm, Rn |
| 带进位加 | ADC Rd, Rm, Rn |
| 减 | SUB Rd, Rm, Rn |
| 带进位减 | SBC Rd, Rm, Rn |
乘法指令的工作方式与加减指令类似,除了将2个32位的数字相乘能够产生一个64位的值之外。普通的MUL指令舍弃了结果的高位,而UMULL指令把结果分别保存在2个寄存器中。有符号的指令SMULL,在需要的时候会把符号位保存在高寄存器中。
| 指令 | 示例 |
|---|---|
| 乘法 | MUL Rd, Rm, Rn |
| 无符号长整形 | UMULL RdHi, RdLo, Rm, Rn |
| 有符号长整形 | SMULL RdHi, RdLo, Rm, Rn |
ARM没有除法指令,因为它不能再单个流水线周期中执行。因此,需要除法的时候,调用外部标准库中的函数。
逻辑指令在结构上和算术指令非常相似,如下图所示。特殊的是MVN指令,执行按位取反然后将结果保存到目的寄存器。
| 指令 | 示例 |
|---|---|
| 位与 | AND Rd, Rm, Rn |
| 位或 | ORR Rd, Rm, Rn |
| 位异或 | EOR Rd, Rm, Rn |
| 位置0 | BIC Rd, RM, Rn |
| 取反并移动 | MVN Rd, Rn |
4.4 比较和跳转
比较指令CMP比较2个值,将比较结果写入CPSR寄存器的N(负)和Z(零)标志位,供后面的指令读取使用。如果比较一个寄存器值和立即数,立即数必须作为第二个操作数:
CMP Rd, Rn
CMP Rd, #imm
另外,也可以在算术指令后面添加S标志,以相似的方式更新CPSR寄存器的相应标志位。比如,SUBS指令是两个数相减,保存结果,并更新CPSR。
ARM跳转指令
| 操作码 | 意义 | 操作码 | 意义 |
|---|---|---|---|
| B | 无条件跳转 | BL | 设置lr寄存器为下一条指令的地址并跳转 |
| BX | 跳转并切换状态 | BLX | BL+BX指令的组合 |
| BEQ | 相等跳转 | BVS | 溢出标志设置跳转 |
| BNE | 不等跳转 | BVC | 溢出标志清除跳转 |
| BGT | 大于跳转 | BHI | 无符号>跳转 |
| BGE | 大于等于跳转 | BHS | 无符号>=跳转 |
| BLT | 小于跳转 | BLO | 无符号<跳转 |
| BLE | 小于等于跳转 | BLS | 无符号<=跳转 |
| BMI | 负值跳转 | BPL | >= 0跳转 |
各种跳转指令参考CPSR寄存器中之前的值,如果设置正确就跳到相应的地址(标签表示)执行。无条件跳转指令就是一个简单的B。
比如,从0累加到5:
MOV r0, #0
loop: ADD r0, r0, 1
CMP r0, #5
BLT loop
再比如,如果x大于0,则给y赋值为:10;否则,赋值为20:
LDR r0, =x
LDR r0, [r0]
CMP r0, #0
BGT .L1
.L0:
MOV r0, #20
B .L2
.L1:
MOV r0, #10
.L2:
LDR r1, =y
STR r0, [r1]
BL指令用来实现函数调用。BL指令设置lr寄存器为下一条指令的地址,然后跳转到给定的标签(比如绝对地址)处执行,并将lr寄存器的值作为函数结束时的返回地址。BX指令跳转到寄存器中给定的地址处,最常用于通过跳转到lr寄存器而从函数调用中返回。
BLX指令执行的动作跟BL指令一样,只是操作对象换成了寄存器中给定的地址值,常用于调用函数指针,虚函数或其它间接跳转的场合。
ARM指令集的一个重要特性就是条件执行。每条指令中有4位表示16中可能的条件,如果条件不满足,指令被忽略。上面各种类型的跳转指令只是在最单纯的B指令上应用了各种条件而已。这些条件几乎可以应用到任何指令。
例如,假设下面的代码片段,哪个值小就会自加1:
if(a<b) { a++; } else { b++; }
代替使用跳转指令和标签实现这个条件语句,我们可以前面的比较结果对每个加法指令设置条件。无论那个条件满足都被执行,而另一个被忽略。如下面所示(假设a和b分别存储在寄存器r0和r1中):
CMP r0, r1
ADDLT r0, r0, #1
ADDGE r1, r1, #1
4.5 栈
栈是一种辅助数据结构,主要用来存储函数调用历史以及局部变量。按照约定,栈的增长方向是从髙地址到地地址。sp寄存器保存栈指针,用来追踪栈顶内容。
为了把寄存器r0压入栈中,首先,sp减去寄存器的大小,然后把r0存入sp指定的位置:
SUB sp, sp, #4
STR r0, [sp]
或者,可以使用一条单指令完成这个操作,如下所示:
STR r0, [sp, #-4]!
这儿,使用了先索引并write-back的寻址方式。也就是说,sp先减4,然后把r0的内容存入sp-4指向的地址处,然后再把sp-4写入到sp中。
ARM调用习惯总结
- 前4个参数存储在r0、r1、r2 和r3中;
- 其余的参数按照相反的顺序存入栈中;
- 如果需要,调用者必须保存r0-r3和r12;
- 调用者必须始终保存r14,即链接寄存器;
- 如果需要,被调用者必须保存r4-r11;
- 结果存到r0寄存器中。
PUSH伪指令可以压栈的动作,还可以把任意数量的寄存器压入栈中。使用花括号{}列出要压栈的寄存器列表:
PUSH {r0,r1,r2}
出栈的动作正好与压栈的动作相反:
LDR r0, [sp]
ADD sp, sp, #4
使用后索引模式
LDR r0, [sp], #4
使用POP指令弹出一组寄存器:
POP {r0,r1,r2}
与X86不同的是,任何数据项(从字节到双word)都可以压入栈,只要遵守数据对齐即可。
4.6 函数调用
《The ARM-Thumb Procedure Call Standard》描述了ARM的寄存器调用约定,其摘要如下:
ARM寄存器分配:
| 寄存器 | 目的 | 谁保存 |
|---|---|---|
| r0 | 参数0 | 不保存 |
| r1 | 参数1 | 调用者保存 |
| r2 | 参数2 | 调用者保存 |
| r3 | 参数3 | 调用者保存 |
| r4 | 临时 | 被调用者保存 |
| … | … | … |
| r10 | 临时 | 被调用者保存 |
| r11 | 栈帧指针 | 被调用者保存 |
| r12 | 内部过程 | 调用者保存 |
| r13 | 栈指针 | 被调用者保存 |
| r14 | 链接寄存器 | 调用者保存 |
| r15 | 程序计数器 | 保存在r14 |
为了调用一个函数,把参数存入r0-r3寄存器中,保存lr寄存器中的当前值,然后使用BL指令跳转到指定的函数。返回时,恢复lr寄存器的先前值,并检查r0寄存器中的结果。
比如,下面的C语言代码段:
int x=0;
int y=10;
int main() {
x = printf("value: %d\n",y);
}
其编译后的ARM汇编格式为:
.data
x: .word 0
y: .word 10
S0: .ascii "value: %d\012\000"
.text
main:
LDR r0, =S0 @ 载入S0的地址
LDR r1, =y @ 载入y的地址
LDR r1, [r1] @ 载入y的值
PUSH {ip,lr} @ 保存ip和lr寄存器的值
BL printf @ 调用printf函数
POP {ip,lr} @ 恢复寄存器的值
LDR r1, =x @ 载入x的地址
STR r0, [r1] @ 把返回的结果存入x中
.end
4.7 定义叶子函数
因为使用寄存器传递函数参数,所以编写一个不调用其它函数的叶子函数非常简单。比如下面的代码:
square: function integer ( x: integer ) =
{
return x*x;
}
它的汇编代码可以非常简单:
.global square
square:
MUL r0, r0, r0 @ 参数本身相乘
BX lr @ 返回调用者
但是,很不幸,对于想要调用其他函数的函数,这样的实现就无法工作,因为我们没有正确建立函数使用的栈。所以,需要一种更为复杂的方法。
4.8 定义复杂函数
复杂函数必须能够调用其它函数并计算任意复杂度的表达式,然后正确地返回到调用者之前的状态。还是考虑具有3个参数和2个局部变量的函数:
func:
PUSH {fp} @ 保存栈帧指针,也就是栈的开始
MOV fp, sp @ 设置新的栈帧指针
PUSH {r0,r1,r2} @ 参数压栈
SUB sp, sp, #8 @ 分配2个局部变量的栈空间
PUSH {r4-r10} @ 保存调用者的寄存器
@@@ 函数体 @@@
POP {r4-r10} @ 恢复调用者的寄存器
MOV sp, fp @ 复位栈指针
POP {fp} @ 恢复之前的栈帧指针
BX lr @ 返回到调用者
通过上面的代码,我们可以看出,不管是ARM架构的函数实现还是X86架构系列的函数实现,本质上都是一样的,只是指令和寄存器的使用不同。
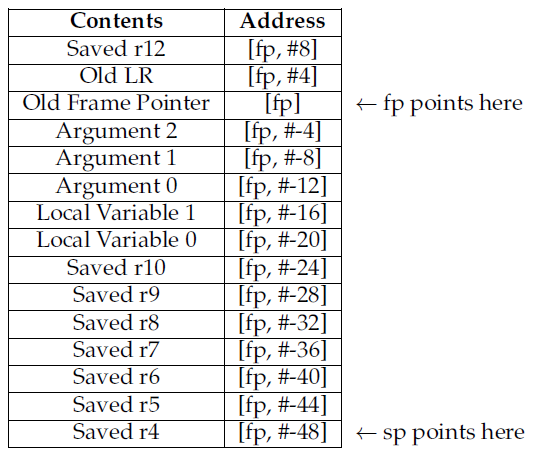
图4 ARM栈布局示例
同样考虑下面一个带有表达式计算的复杂函数的C代码:
compute: function integer
( a: integer, b: integer, c: integer ) =
{
x: integer = a+b+c;
y: integer = x*5;
return y;
}
将其完整地转换成汇编代码,如下所示:
.global compute
compute:
@@@@@@@@@@@@@@@@@@ preamble of function sets up stack
PUSH {fp} @ save the frame pointer
MOV fp, sp @ set the new frame pointer
PUSH {r0,r1,r2} @ save the arguments on the stack
SUB sp, sp, #8 @ allocate two more local variables
PUSH {r4-r10} @ save callee-saved registers
@@@@@@@@@@@@@@@@@@@@@@@@ body of function starts here
LDR r0, [fp,#-12] @ load argument 0 (a) into r0
LDR r1, [fp,#-8] @ load argument 1 (b) into r1
LDR r2, [fp,#-4] @ load argument 2 (c) into r2
ADD r1, r1, r2 @ add the args together
ADD r0, r0, r1
STR r0, [fp,#-20] @ store the result into local 0 (x)
LDR r0, [fp,#-20] @ load local 0 (x) into a register.
MOV r1, #5 @ move 5 into a register
MUL r2, r0, r1 @ multiply both into r2
STR r2, [fp,#-16] @ store the result in local 1 (y)
LDR r0, [fp,#-16] @ move local 1 (y) into the result
@@@@@@@@@@@@@@@@@@@ epilogue of function restores the stack
POP {r4-r10} @ restore callee saved registers
MOV sp, fp @ reset stack pointer
POP {fp} @ recover previous frame pointer
BX lr @ return to the caller
构建一个合法栈帧的形式有多种,只要函数使用栈帧的方式一致即可。比如,被调函数可以首先把所有的参数和需要保存的寄存器压栈,然后再给局部变量分配栈空间。(当然了,函数返回时,顺序必须正好相反。)
还有一种常用的方式就是,在将参数和局部变量压栈之前,为被调函数执行PUSH {fp,ip,lr,pc},将这些寄存器压入栈中。尽管这不是实现函数的严格要求,但是以栈回溯的形式为调试器提供了调试信息,可以通过函数的调用栈,轻松地重构程序的当前执行状态。
与前面描述X86_64的示例时一样,这段代码也是有优化的空间的。事实证明,这个函数不需要保存寄存器r4和r5,当然也就不必恢复。同样的,参数我们也不需要非得保存到栈中,可以直接使用寄存器。计算结果可以直接写入到寄存器r0中,不必再保存到变量y中。这其实就是ARM相关的编译器所要做的工作。
4.9 ARM-64位
支持64位的ARMv8-A架构提供了两种扩展模式:A32模式-支持上面描述的32位指令集;A64模式-支持64位执行模式。这就允许64位的CPU支持操作系统可以同时执行32位和64位程序。虽然A32模式的二进制执行文件和A64模式不同,但是有一些架构原理是相同的,只是做了一些改变而已:
-
字宽度
A64模式的指令还是32位大小的,只是寄存器和地址的计算是64位。
-
寄存器
A64具有32个64位的寄存器,命名为x0-x31。x0是专用的0寄存器:当读取时,总是返回0值;写操作无效。x1-x15是通用目的寄存器,x16和x17是为进程间通信使用,x29是栈帧指针寄存器,x30是lr链接寄存器,x31是栈指针寄存器。(程序寄存器(PC)用户态代码不可直接访问)32位的值可以通过将寄存器命名为w#来表示,而不是使用数据类型后缀,在这儿#代表0-31。
-
指令
A64模式的指令大部分和A32模式相同,使用相同的助记符,只是有一点小差异。分支预测不再是每条指令的一部分。相反,所有的条件执行代码必须显式地执行CMP指令,然后执行条件分支指令。LDM/STM指令和伪指令PUSH/POP不可用,必须通过显式地加载和存储指令序列实现。(使用LDP/STP,在加载和存储成对的寄存器时更有效率)。
-
调用习惯
当调用函数的时候,前8个参数被存储到寄存器x0-x7中,其余的参数压栈。调用者必须保留寄存器x9-x15和x30,而被调用者必须保留x19-x29。返回值的标量部分存储到x0中,而返回值的扩展部分存储到x8中。
5 参考
本文对基于X86和ARM架构的汇编语言的核心部分做了阐述,可以满足大部分需要了。但是,如果需要了解各个指令的细节,可以参考下面的文档。
- Intel64 and IA-32 Architectures Software Developer Manuals. Intel Corp., 2017. http://www.intel.com/content/www/us/en/processors/architectures-software-developer-manuals.html
- System V Application Binary Interface, Jan Hubicka, Andreas Jaeger, Michael Matz, and Mark Mitchell (editors), 2013. https://software.intel.com/sites/default/files/article/402129/mpx-linux64-abi.pdf
- ARM Architecture Reference Manual ARMv8. ARM Limited, 2017. https://static.docs.arm.com/ddi0487/bb/DDI0487B_b_armv8_arm.pdf.
- The ARM-THUMB Procedure Call Standard. ARM Limited, 2000. http://infocenter.arm.com/help/topic/com.arm.doc.espc0002/ATPCS.pdf.